ePower System Diagram

Electronics Terminology:
ESC - Electronic Speed Controller
Brushed and brushless ESC types. Match to motor type. Brushed = 2 wires, Brushless = 3 wires. Brushless utilize a sine wave signal to the three windings , brushed use a square wave signal to the two brushes.
ESC Function: The brushless ESC alters the frequency of the electronic pulses to the three motor windings to alter the speed of the motor ( rpm). Higher frequency creates more epower pulses per second and the battery provides the voltage and amperage to match the motors rpm to the signal. This causes the motor to draw as many amps as the battery/esc can provide until the matching rpm is achieved.
ESC’s are rated for both voltage and amperage they can handle. They must be matched to the motor and battery capacities. Burst rating is for <10 seconds.
BEC – Battery
Eliminator Circuit
Most ESC’s, but not all, have a built in BEC. This provides separate epower sources for the motor and the receiver servos. If a system has more than 4 servos being fed by the receiver, estimate the demand and compare it to the BEC amp rating. A wattmeter can measure the servo demand. If the demand is too great, a low voltage to the receiver could result causing a controls failure.
LVC = Low Voltage Cutoff for Lipo the ESC can be programmed for 3.3v to 3.0v
If the LVC is sensed by the ESC, it will either pulse (soft stop) or cut off (hard stop) the motor power, but it will keep the receiver and servos supplied with power until the battery shuts down.
ESC’s can be reprogrammed with a programming card or with a beeping code using the transmitter controls. The default settings are usually good and are outlined in the user instructions.
Initiating a system - When the ESC first sees the electrical potential (battery connection), the ESC emits several beeps equal to the number of lipo cells it sees, then a long tone to indicate it has armed the motor. The throttle usually must be in the failsafe position (off) in order for the esc to arm the motor. A constant beeping indicates a failure to initialize the ESC/BEC system.
LBEC:
Most BECs are this type. Linear BEC reduces the voltage from that of the motor
battery down to 5v or 6v basically by putting a resistance in the line. It gets
hotter as the
battery voltage goes up and as the current goes up.
So they're generally limited to powering 4 servos off a 3S battery, or 3 servos
off a 4S battery.
SBEC:
Switching BECs reduce the average voltage down to 5v or 6v by switching
the supply on and off several thousand times per second so, with no resistance
in the line, they don't heat up like linear ones do. They generally handle
higher input voltages and more servos.
UBEC:
It stands for Ultimate BEC, and is the trade name of a particular manufacturer,
but it's used by many others these days to mean a stand-alone switching BEC.
OPTO:
The "OPTO" ESC require that a separate battery pack be installed to power
the receiver. Because the motor control circuitry is optically isolated from
the line to the Rx, glitches due to motor noise are greatly reduced.
Motor Terms:
Armature: the rotating coils of a dynamo or electric
motor.
Stator : The stator is the stationary part of the motor’s electromagnetic
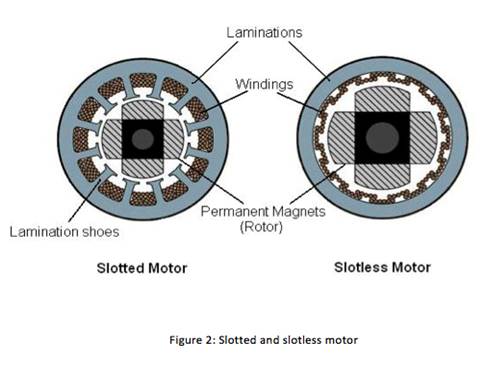
circuit and consists of either windings or permanent magnets.
Poles: Poles are the number of electromagnetic
windings that a motor has.
Windings: Windings
are wires that are laid in coils, usually wrapped around a laminated soft iron magnetic core so as to form magnetic poles when energized
with current.
Wire gage: gage is wire diameter and sets the
resistance and amperage capability.
Dimensions: diameter and length of the motor
body are often stated as mm. 2530 would be 25mm diameter and 30mm long.
Innrunner: output shaft is the central rotating part, outer body is attached to the plane.
Outrunner: output shaft is attached to the outer bell, inner stator attached to the plane.
kV rating: (ie: 540kv) means (voltage constant), how many rpm a motor will turn per applied volt. (no load) The number of winds in the motor armature determines the motors speed response to voltage.
Motor Types:
Brushed Motors: have carbon contact brushes. Two wires (power and ground) feed the motor. The brushed ESC moderates voltage to control motor rpm. Motor direction can be reversed by reversing polarity of the wires. Best for stepper motors and directional control applications like servos. Brushes generate electronic noise and wear over time.
Brushless Motors: No physical contact of internal parts. Three separate windings are controlled by the ESC. Reversing any two wire leads, reverses the motor rotation.
Amp rating: the wire size used for the windings determines the amps it can carry without burning the insulation off the wires and then shorting out. Specs usually call out constant amps and burst amps.
Selecting a motor: The motor is selected to supply the torque and rpm that the propeller needs to pull the aircraft through the maneuvers the pilot wants to do. The motor is mated to the esc and battery as a set. Oversize the motor for the watts you will need. Ie: need 100watts of power, select a 120watt rated motor.
EXAMPLE OF MOTOR SPECIFICATIONS: HOBBYKING NTM Prop Drive 28-36 2200KV / 696W
Model: NTM Prop Drive Series 2836 2200kv (Short shaft version)
Kv: 2200rpm/v
Poles: 3
Motor Wind: 7T
Max current: 50A
Max Power: 310W @ 11.1V (3S) / 696W @ 15V (4S)
Shaft: 4mm
Weight: 87g (3
oz)
ESC: 40~60A
Cell count: 3s~4s Lipoly
Bolt holes: 16mm & 19mm
Bolt thread: M3
Connection: 3.5mm Bullet-connector
Prop
Test Data:
5x5 - 11.1V / 232W / 20.9A / 0.64kg thrust
5x5 - 14.8V / 516W / 34.9A / 1.021kg thrust
6x4 - 11.1V / 310W / 28.0A / 0.945kg thrust
6x4 - 14.8V / 696W / 47.0A / 1.17kg thrust
My calculations
for continuous amps: 310W /
11.1 = 28AMPS 696W / 14.8 =
47AMPS
Working Principles and
Operation
The underlying principles for the workings of a BLDC motor
are the same as for a brushed DC motor; i.e., internal shaft position feedback.
In the case of a brushed DC motor, feedback is implemented using a mechanical commutator
and brushes. With a BLDC motor, it is achieved using multiple feedback
sensors. The most commonly used sensors are hall sensors and optical
encoders.
Brushless DC Motors (BLDCM) have permanent magnets on the
rotating shaft (rotor) and windings on the stationary (stator) part (bell) that
is attached to the plane.
Winding are layered into the lamination shoes in a star (Y)
pattern or in a delta (V) pattern. The star pattern gives the highest torque
rating.
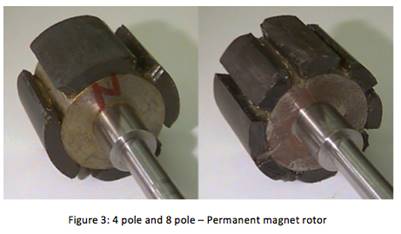
Rotor magnet quality (high flux density) increases the
efficiency and torque. More magnet poles
also increased torque.
Brushed motors have very high initial torque that fades with
rpm due to brush contact losses. They
are generally less expensive and require periodic brush maintenance.
Brushless motors have a more consistent torque over their rpm
range and make less electrical noise.
They have more expensive controllers.
Propellers:
Propellers for RC aircraft come in many sizes, shapes and materials: Each type of flying and aircraft has a type that is optimal. At the field, the most common are the plastic types for their durability. Note that the fuel motors generally use a heavier construction than the electrics. The numbers always face forward.
Diameter is the full length of the propeller.
Pitch is the “inches per revolution” that a propeller would travel if no slippage occurred. Speed is affected mostly by the pitch for a flying aircraft.
Thrust is the force generated by the propeller at a given rpm and air density (altitude).
Static Thrust is the force generated by the propeller when the plane is stationary at a given propeller rpm. Static Thrust is affected most by the diameter and stall rpm.
Sizing: if you put too large a diameter prop on a
fuel motor, it will lug the motor and not perform well, but no harm done. If you put too large a diameter prop on an
electric motor, the esc/motor will keep trying to rev up and overheat the
esc/motor. Use a watt meter to verify
that your propeller is properly sized.
If choosing a three or four bladed propeller, the general rule of thumb is to decrease the prop diameter by an inch and increase the pitch by an inch
Online Thrust
calculators:
To design a balanced ePower system, you can use an online thrust calculator. Try these:
http://www.gobrushless.com/testing/thrust_calculator.php basic calc only
http://flbeagle.rchomepage.com/software/webocalc_1.7.6/webocalc.html medium complexity
http://adamone.rchomepage.com/calc_thrust.htm less info, less complicated
http://www.ecalc.ch/motorcalc.php very detailed and complicated
Sizing an ePower system for a aircraft: Estimate the work the system must provide:
Type of flying:
Scale- TOL, shallow climb rate, mostly level flight, lightly loaded. Flys on the wings.
Acrobatic/IMAC – steep climb rates, vertical uplines maintained, higher speed requirements.
3D radical – hanging on the prop., pull up from a prop hang, rapid accelerating.
Watt power estimates
taken from RC Groups forums:
50-70 watts per pound;
Minimum level of power for decent performance, park flyer/slow flyer models
70-90 watts per pound; Trainers and slow
flying scale models
90-110 watts per pound; Sport aerobatic and
fast flying scale models
110-130 watts per pound; Advanced aerobatic
and high-speed models
130-150 watts per pound; Lightly loaded 3D
models and ducted fans
150-200+ watts per pound; Unlimited
performance 3D and aerobatic models
Weight of the aircraft x Type of flying = work to be done
Watts = Battery nominal volts times ESC amps.
Maximize watts with
voltage:
3S batt = 11.1v. 600w/11.1v = 54 amp ESC, 4S batt = 14.8v. 600/14.8v = 40amp ESC.
Battery size for flight time:
A 2200mah battery has
2.2 amp hours of stored energy, max.
You should only use
about 65% of that energy to prolong battery life. So 2200 x 65% = 1430mah.
I use test flights to estimate how much time to fly and set my
radio timer alarm to leave the battery
with about 3.7v unloaded per cell after a flight. I also use a voltage alarm to warm me if the
battery is seeing 3.3v under load.
Manufacturers
recommendations are a good place to start.
Some of the thrust calculators will also estimate flight times.
But it still comes down to how you fly your
plane on that flight. Maneuvers, wind,
temperature, etx.
BALANCE THE SYSTEM
COMPONENTS TO THE NEED:
Provide an ESC with an amp constant rating equal to the motor amp constant power rating. Both the motor and esc should have the same burst rating as well. ( amps for <10 seconds).
EXAMPLE: Multiplex
Fun Cub: Weight: 3.5 pounds
Fly Scale at 100 watts per pound 3s battery 2200mah at 35C battery
100w times 3.5 pounds = 350watts / 11.1v = 31.5amps (select a 40amp esc and motor)
100w times 3.5 pounds = 350watts / 14.8v = 23.6amps (select a 30amp esc and motor)
--------------------------------------------------
Acrobatic at 150 watts per pound 3S battery 2200mah at 35C battery
150w times 3.5 pounds = 525 watts /11.1v = 47.3 amps (select a 60amp esc and motor)
150w times 3.5 pounds = 525 watts /14.8v = 35.5 amps (select a 45amp esc and motor)
----------------------------------------------------
3D radical at 250 watts per pound 4S battery 2200mah at 35C battery
250w times 3.5 pounds = 875 watts /11.1b = 78.8 amps (select a 100amp esc and motor)
250w times 3.5 pounds = 875 watts /14.8v = 59.1 amps (select a 75amp esc and motor)
References:
How
an AC Motor and its ESC works !! (Tutorial) RCPowers.com
Thrust
vs Power to Weight Ratios for Prop Planes Flitetest.com
Beginner
Series - Power System Flitetest.com
Brushless-DC-Motors-
construction www.edn.com
ESC
types Lukewarm, RC Powers.com
One Battery, One receiver, two ESC
with two motors, using two channels for
motor control:

Multiple motors can be run from one receiver and one battery with each motor having it’s own ESC. A y-connector for the battery, and separate channels are used to plug in the ESC’s, with one of theESC having it’s signal wire (red) being cut. This allows for balancing the motors rpms and differential power for rudder mixed turning. Up the battery mah to support running two motors.
Multiple motors can also be run from one ESC if the esc is large enough to power both loads. However, they cannot be balanced for starting, rpm and may not start on occasion.